国内花卉自动移栽机构研究现状:高国华冯青春与赵雄技术路线对比
摘要:本文分析了国内多项花卉自动移栽技术的研究成果。涵盖了北京工业大学的模块化红掌移栽装置、冯青春研制的基于PC多级控制的幼苗移栽机、孙国祥提出的视觉识别移栽系统,以及浙江理工大学赵雄等人研发的高效率非圆间歇传动旋转式取苗机构。通过对比不同机构的轨迹特性、工作效率及适用范围,探讨了实现高可靠性、高效率穴盘苗移栽的技术路径。
关键词:花卉移栽机;自动取苗机构;行星轮系;尖嘴形轨迹;农业自动化
北京工业大学:模块化红掌盆间移栽装置
北京工业大学高国华等根据模块化划分的思想,用气缸控制手臂先聚拢花叶、后探出钢针完成取苗,实现了红掌的盆间自动化移栽[22-24],其工作过程如图1-7所示。该装置适于在小花盆中将长到一定的花卉幼苗移入大花盆中。不适于本文研究的将一串红钵苗从穴盘移入到花盆中的栽植要求。

冯青春:基于PC机的多级控制移栽机
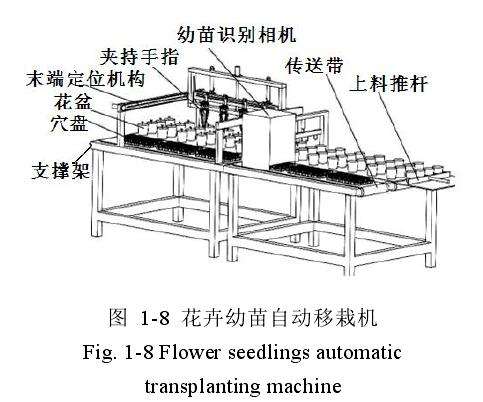
国内学者也参照国外花卉移栽机工作原理开展了花卉移栽样机的研制,冯青春等人研制了一种花卉幼苗自动移栽机[25,26],如图1-8所示。
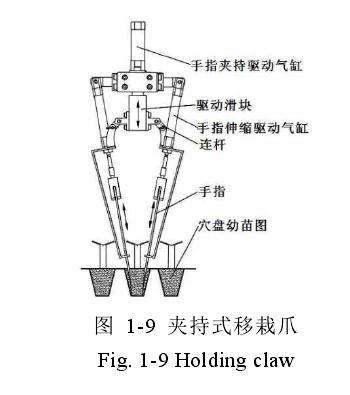
该机器的组成与荷兰VISSER开发的PC-16型花卉移栽机类似,以4盘为一组移栽,相应配有4套移栽爪,如图1-9所示。该机器采用了基于PC机的多级控制系统,单个移栽爪效率为13~15株/min,提高移栽效率需增加组数,导致结构更加复杂,成本进一步增加。
孙国祥:集成视觉识别的穴盘苗移栽系统
孙国祥等人提出了一种适于移栽穴盘苗的移栽机,该机构由四个系统组成,分别为:移栽系统、视觉识别系统、PLC控制系统和传送系统[27]。其末端执行器采用了杆机构形式,钵苗基质抓取和释放动作由步进电动机驱动完成。该移栽机系统复杂,移栽效率为12~15株/min,工作可靠性依赖于电子识别系统。
浙江理工大学:高效率旋转式自动取苗机构
浙江理工大学的赵雄等人发明了系列非圆间歇传动的旋转式自动取苗机构[28],如图1-10所示,该机构形成“尖嘴形”轨迹扎进穴盘中,利用取苗爪夹持住幼苗带出穴盘。同时也分析了“尖嘴形”轨迹形成机理,提出二次不等幅摆动运动规律设计,发明了一种取苗机构,如图1-11所示,也实现本文所需的同类工作轨迹。
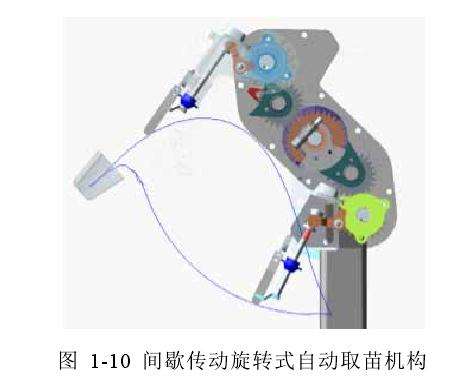
这两种行星轮系传动机构可以双移栽爪布置,机构运转一周可以完成两次取苗动作,机构的取苗效率高,机构的移栽速度可以达到120株/min。若仅需要完成从穴盘中夹出幼苗、在轨迹的最低点松开幼苗的动作,图1-11所示的轨迹可以满足要求,但花卉移栽机中取苗机构需与送苗装置及机架、花盆输送装置配合完成移栽工作,要求机构实现更低的轨迹最低点以便取苗机构能将幼苗运送至花盆中,若欲实现取苗机构直接将幼苗栽入花盆作业方式则轨迹的要求更高。