基于机器人的盆栽作物生长环境智能监控设计
2020-09-01
31
核心提示:基于机器人的盆栽作物生长环境智能监控系统设计
基于机器人的盆栽作物生长环境智能监控系统设计
摘要:针对作物育/选种过程中,采用人工操作方式对作物样本植株个体的生理指标和生长环境参数进行高频次采集,存在数据采集精度低、生产效率低、劳动强度大等问题,设计一种以AGV为采集终端的盆栽作物生长环境智能监控系统。系统以FPGA控制器为硬件核心,结合传感器、采集装置、导航、定位和Wi-Fi传输模块将采集的环境参数和图像信息传至上位机,上位机根据预先设定指令控制AGV执行终端依次对选取样本植株个体的图像和生长环境信息进行自动采集,并结合设定参数实现执行机构的远程控制功能,提高了育/选种过程中的智能化管理水平。试验结果表明,该系统采集盆栽作物的生长环境参数精度高、图像信息完整清晰、采集样本位置精度误差为25mm、停车定位精度误差为±10mm,无走偏和脱轨现象。该研究有利于技术人员快速、准确获取作物的生长环境和生长态势信息,为培育出更优质的农作物品种提供科学依据。
1 引言
随着人民对生活水平要求提高和人们对粮食、蔬菜、水果的高质量和高品质的需求,获得质量好、产量高、更优质的农作物品种迫在眉睫[1-3]。在盆栽作物温室育/选种过程中,需要对样本植株个体的生理指标和生长环境数据进行高频次精准采样,由于育/选植株样本基数大、数据采集的频次高,仍采用人工方式对育/选样本植株个体生长周期内的生理指标和生长环境相关数据进行采集,具有采集效率低、劳动强度大、准确性差等缺点,已成为制约育/选种技术发展的瓶颈,严重制约着现代农业的发展[4-8]。
为了提高农作物的产量、品质、经济效益和智能化管理水平[9],目前国内外学者开发了许多功能不同、结构各异的设施监控平台。莫建麟[10]提出一种基于物联网的农作物长势监控系统,在簇头和网关处对采集数据进行2级数据融合,实现对农作物长势的有效监控,对农作物高粱的长势进行了测试,测试结果与实际值的误差最大值为2cm。赵巧设计了一种基于物联网的农作物试验基地监控管理系统,实现智能灌溉、施肥和害虫防治3大功能,对水稻、玉米和棉花3种作物进行测试,实现作物高产和资源节约,有助于实现试验基地的高效运行和精准管理。张晓东等人设计了一种悬轨式温室综合信息自动监测装置,采用多传感器探测技术实现对作物营养、长势、水分、病虫害和环境信息的无损检测。臧贺藏[11]等人设计了一种基于物联网技术的粮食作物生长远程监控与诊断平台,实现粮食作物生长过程中所需关键环境因子、作物长势以及视频图像信息的远程采集,提高了农业精细化管理水平,但存在监测点少、网络传输数据不太稳定等问题。Sammons P J[12]设计了一种温室自主移动机器人,能在炎热潮湿的玻璃温室内喷洒农药,减少了温室密闭空间内喷洒有毒化学物质对人体的伤害,实现了害虫控制和疾病预防。
综上所述,现有监控平台多采用有线或无线方式仅能对温室内固定位置作物生长的环境参数和姿态信息进行检测,难以实现对不同生长期、不同种类和大中小不同株型作物的环境、长势和病虫害信息的全方位检测。为此,本文提出了一种以AGV机器人为移动终端、采样装置、FPGA控制器、传感器、Wi-Fi视频传输模块、无线传输模块和执行机构为硬件核心,以C#监控软件为开发平台的盆栽作物智能监控系统,实现了作物生长的三维立体式采样、远程调控、数据查询和存储等功能,提高了盆栽作物育/选种过程的智能化监控和管理水平。
1 监控系统硬件设计
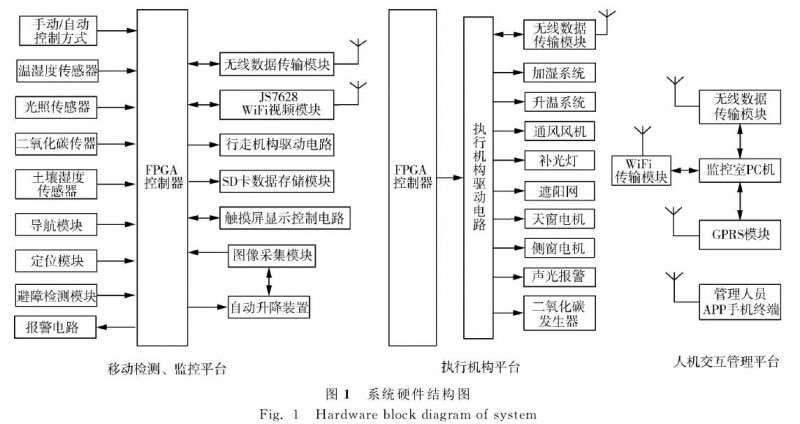
盆栽作物生长环境智能监控系统的硬件结构如图1所示,该系统主要由移动检测、监控平台,执行机构平台和人机交互管理平台组成。
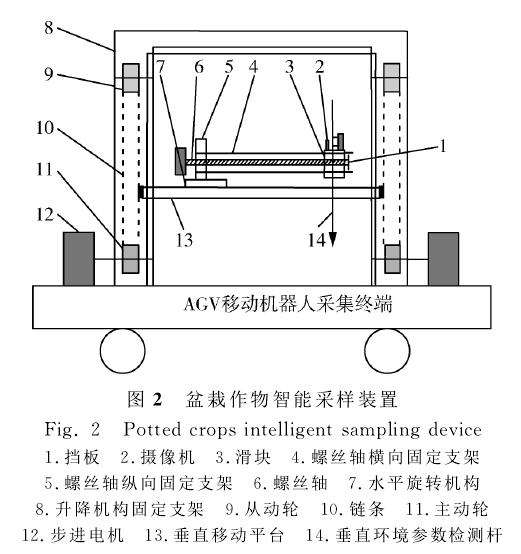
系统在手动控制方式下,管理人员可以借助JS7628Wi-Fi视频传输模块对机器人行走路线和采样机构进行远程控制。在自动控制方式下,通过安装在机器人底盘上的导航、定位模块和避障检测模块将采集植株样本的路径、定位和路面障碍物信息传至FPGA控制器,FPGA控制器结合循迹、避障算法和行走机构电机差速来实现AGV机器人在温室过道内安全行走,当安装在底盘上的RFID读卡器检测到磁带上定位标签信息时停止运动,智能采样装置按照预先设定指令对已选植株生长环境和图像信息进行立体式采样,并以无线方式传至上位机,上位机借助C#监控软件将采集值与设定值进行比较,若在设定范围内,则执行机构维持原状态,否则产生相关报警指示,并通过Wi-Fi或GPRS模块将启停控制指令发送给现场执行机构,以便及时调整超限环境参数,从而实现盆栽作物生长过程的智能化控制。盆栽作物智能采样装置如图2所示。
根据盆栽作物植株个体采样位置不同,在FPGA控制器作用下,通过步进电机、主动轮、从动轮和链条带动垂直移动平台改变采集样本的整体水平高度;通过旋转机构控制水平采集位置实现180°旋转;通过螺丝轴和滑块对采集样本的深度进行控制调整;通过步进电机、滑块上携带的垂直环境参数检测杆和摄像机对同一样本植株个体所处不同高度的环境参数和图像信息进行采集;通过对步进电机的协同控制来调整360°旋转摄像头的高度和水平深度,能够有效避开作物之间的相互遮挡,实现对植株个体的分段或全貌图像信息采集。
为了实现植株全貌图像采集功能,摄像头采用等视距动态图像采集方式,通过调整自动升降装置携带摄像头传感器的高度分段对植株图像进行采集,并将采集到的不同段的植株图像传至上位机进行图像拼接处理,从而实现获取等视距植株图像的全貌功能。为实现AGV移动机器人沿预定轨道准确、快速自主循迹功能,结合循迹和双模糊PID控制算法[13-14],采用基于红外反射式光电传感器车前和车后2级导航方式。为了更好地获取弯道和轨道信息,前后级红外反射式光电传感器分别采用非均匀M型和等距一字型传感器排列方式,并分别安装在机器人车体前端10cm处和车体底部两个主动轮之间。
FPGA控制器根据设定的采集样本植株个体的具体采集位置来控制执行装置转动,并将采集样本的编号、数据和图像传至上位机,经环境信息数据融合调控算法分析、判断后,实现执行机构的远程控制,为盆栽作物提供最适宜的生长环境提供保障。同时,研究人员借助PC、智能终端APP和后台数据库可以查询不同植株、不同育种时间植株个体的生长过程信息,以便研究人员快速建立作物生长环境与品质、产量之间的最优控制模型,并对相应作物的种植技术进行改进,为培育出更优质的农作物品种提供科学依据。