宿迁绿道选线分析:LSTM神经网络驱动下的居民活动与路径模拟
摘要
本研究通过分析采集到的居民运动轨迹数据,揭示了绿道活动特征。慢行轨迹热度主要集中在中心城区路网,尤其是大型公园周边(如古黄河湿地公园、湖滨公园、三台山森林公园)。起点核密度集中在宿城区古城,而终点核密度集中在古黄河湿地公园南侧,表明该公园是热门目的地。研究利用长短期记忆(LSTM)神经网络训练道路指标变化规律,并将该规律加载至人工智能框架中的智能体进行绿道路径模拟。经过验证,模型拟合度高,预测轨迹与真实轨迹热度相关系数为0.82,具有较高可信度。最终,模拟结果识别出湖滨大道、项王路、金沙江路、振兴大道等适合串联打造绿道系统的路径,为绿道选线提供了科学基础。
关键词
绿道选线;居民活动特征;运动轨迹;LSTM神经网络;人工智能框架;路径模拟;相关系数
文章目录
4.1 居民绿道活动特征
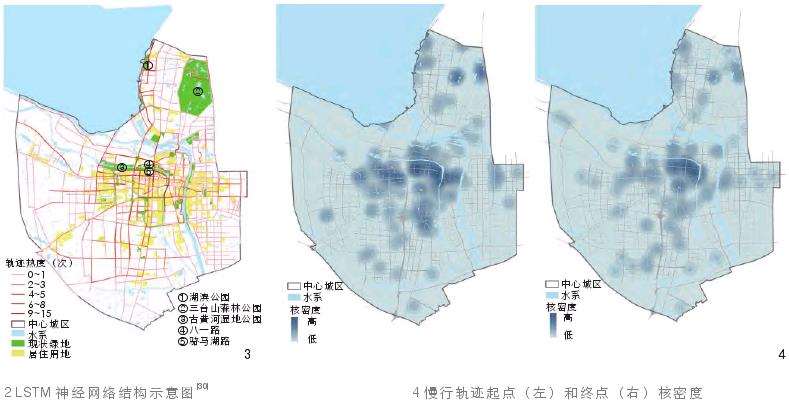
将采集到的居民运动轨迹进行空间可视化表达(图3),可看出慢行轨迹基本覆盖到中心城区全部路网。轨迹热度较高的道路主要集中在宿豫区和宿城区中心区域,外围郊区和乡镇的道路轨迹热度相对较低。中心城区大型公园附近慢行轨迹热度尤为集中,如古黄河湿地公园周边的八一路、骆马湖路。中心城区北侧的湖滨公园、三台山森林公园周边道路也呈现较高的慢行热度,是居民运动较多的线路。
从慢行轨迹起点及终点核密度来看,起点核密度主要集中在宿城区古城,特别是人民广场、市政府、古黄河两岸等地,这些区域人口分布较为密集,以居住人口集聚为主。慢行轨迹终点核密度则更为集中,主要沿着古黄河湿地公园南侧分布,表明古黄河湿地公园人流集聚量较大,成为热门慢行目的地(图4)。
4.2 绿道选线模型训练及路径模拟
4.2.1 机器学习模拟及验证
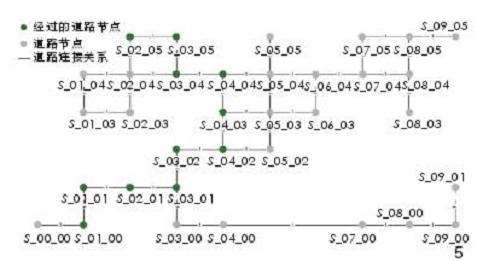
按照拓扑学原理,将所有道路抽象为节点,节点与节点之间的关系抽象为联系,道路指标与路网对应形成附指标的路网,并将其简化为拓扑路网(图5)。将道路抽象成拓扑点,按照行列排布形成拓扑网络,用S作为代号,在代号之后加上行列的后缀作为拓扑点代号,如“S_08_09”表示第八列第九行道路拓扑点。
经过数次测试之后,本研究设置LSTM神经网络时间步长记录为3,隐藏层为4,迭代轮次为5,其计算效果最佳。将已根据运动轨迹道路顺序生成的指标变化表数据输入设置好的LSTM神经网络进行训练,将变化规律结果导出,作为后续人工智能的智能体运行规则。考虑到道路不同维度变量的多重影响,本研究的LSTM神经网络模型采用单变量输入,避免多变量输入对模型精度的影响。
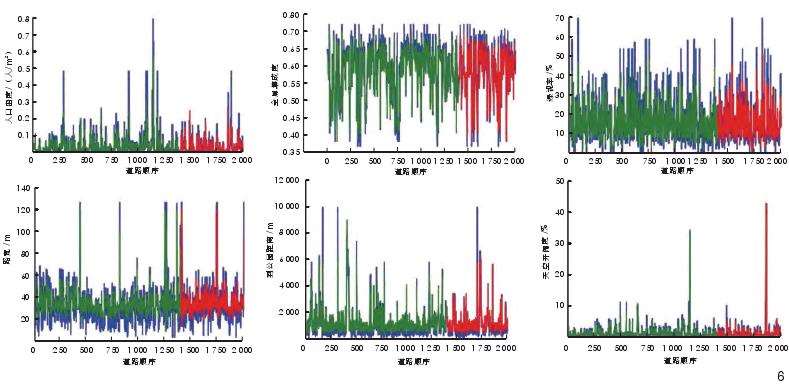
LSTM神经网络模型在输入门即道路的相关指标向量中,与记忆状态向量相连,在序列输入中通过记忆状态向量与隐含状态向量在遗忘门中决定是否对该条轨迹进行记忆,最终通过输出门输出各变量的记忆模型。随机选择运动轨迹的70%作为训练集,30%作为测试集,测试结果中绿色是测试部分,红色为利用已生成模型对规律进行验证(图6)。
各个指标在整体范围内的均方根误差均较小,拟合度基本都高于80%,平均损失也很小,可认为输出的各模型相对精准,可输入人工智能模型进行下一步运算。其中,因为不同类别POI设施在不同片区空间分布差异太大,
POI设施混合度指标误差较大,在分析中予以剔除。
4.2.2 绿道路径模拟及验证

将LSTM神经网络输出的变化规律加载至人工智能框架中的智能体中,输入真实运动轨迹的起终点,使智能体按照指标变化规律模拟生成轨迹(图7)。其中,输出轨迹与训练集的起终点相关,在道路指标变化规律已得到验证的基础上,本研究进一步对模拟轨迹的合理性进行验证,确保人工智能框架的输出结果具有鲁棒性。
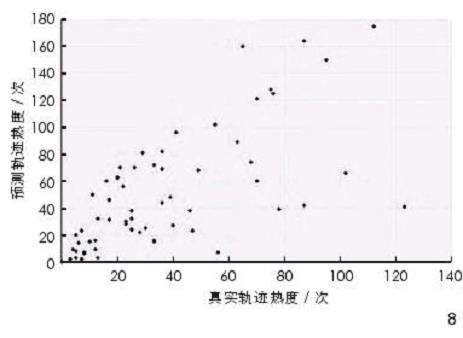
本研究计算每一条轨迹真实热度和预测热度值,其中每一条轨迹的热度值为每一段道路通过次数之和,并分析真实值和预测值二者相关性。通过测算,真实轨迹热度和预测轨迹热度相关系数为0.82,可以认为预测轨迹与真实轨迹较为接近,整体模型具有较大可信度(图8)。
4.2.3 出行路径模拟
将指标变化规律和拓扑路网输入人工智能框架,以所有居民小区中心为起点,大型公园绿地入口作为终点。其中公园绿地包括虞姬公园、雪枫公园、古黄河风光带、马陵公园等,整体上呈现均匀分布,平均面积为72.67hm2。
将人工智能框架内预置的智能体在拓扑路网中根据指标变化规律模拟轨迹运行,最终输出路线模拟后的运动轨迹,对轨迹做热度统计处理,得到基于人工智能的绿道选线基础(图9)。根据热度分析结果,可看出湖滨大道、项王路、金沙江路、振兴大道等路径居民出行经过频次较高,适合串联打造绿道系统。