花卉移栽机构研究现状:全球自动化钵苗移栽机器人与电液气一体化系统分析
摘要:本文综述了全球发达国家在花卉与蔬菜钵苗移栽机械自动化领域的研究现状。通过对美国奥本大学与伊利诺伊大学的机器人移栽试验、韩国五杆取苗机构、荷兰VISSER公司PIC-Mat系列及意大利Urbinati电液气一体化系统的分析,总结了当前移栽技术在专业化、精密化及取栽一体化方向的发展趋势,并指出目前相关设备在通用性、维护成本及系统复杂性方面存在的挑战。
关键词:花卉移栽机构;自动化移栽;钵苗机器人;末端执行器;工厂化育苗
国外花卉移栽机械化概况
国外发达国家农业移栽自动化水平较高,起步较早,在上世纪20年代,国外就展开了关于花卉和蔬菜钵苗移栽的机械自动化研究,并且发展比较迅速,现在丹麦、德国、意大利、荷兰等国,几乎大多数的大田蔬菜和花卉的生产都实现了工厂化育苗和全自动化移栽,日韩等国的钵苗移栽机械也朝着专业化、精密化的方向发展,目前钵苗移栽机械大体上分为两类:1.以机器人或机械臂为载体的自动移栽机械;2.具有电液气一体化的自动化移栽系统[9]。
美国:机器人载体与仿真技术研究
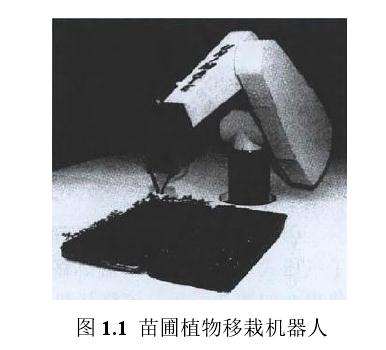
1987年,美国奥本大学的L.J.KUT[10-11]利用计算机图形学和仿真技术研究了机器人移栽苗圃植物的可行性,以puma560机器人为载体,通过计算机辅助设计了一种专用的机器人苗木夹持器,安装在机器人上,如图1.1所示,并进行了移栽试验和测试,将钵苗从392穴的苗盘移栽到36穴的苗盘中,每盘所用的平均时间为3.3分钟,实验所用的时间与计算机仿真所用的时间的误差在10%以内,实现了96%的无损成功移栽。
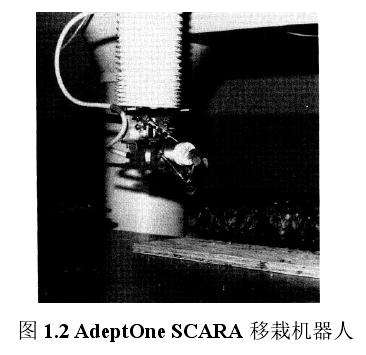
1991年,美国伊利诺伊大学教授TINGKC[12]的团队以AdeptOneSCARA机器人作为本体,设计了一种移栽机器人,该机器人有四个自由度,如图1.2所示。该团队设计了两种针状末端执行器,一种是摆动式,一种是滑移式,实验效果证明,滑移式执行末端比摆动式的效果更好,末端执行器端载有视觉传感器和力传感器,分别用于检测苗穴的位置和感知夹持力的大小,该设备可以适应大多数尺寸和形状类型不一的钵苗。
韩国:五杆机构取苗装置设计
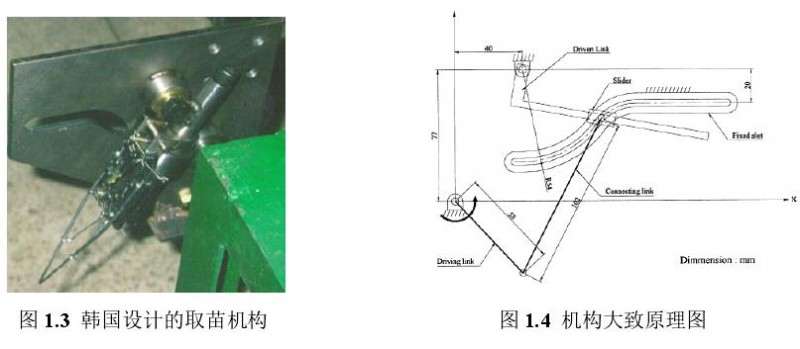
2002年,韩国的科研团队设计了一种蔬菜移栽取苗装置,如图1.3所示,并对23天龄的幼苗进行移栽实验,每分钟可以取苗30株,取苗的成功率为97%[13]。该机构是一个包含滑块、固定滑槽、驱动杆、中间连杆、摇杆的五杆机构,一个驱动杆转动带动滑块在滑槽中运动,同时另一个驱动杆在滑块中伸缩,该部分被设计成取苗爪,进行取苗、放苗。固定的滑槽是由弧线和直线组成,当滑块在直线部分运动时进行取苗,在弧线部分运动时进行放苗,机构的大致原理如图1.4所示。
荷兰VISSER:高速取栽一体化技术
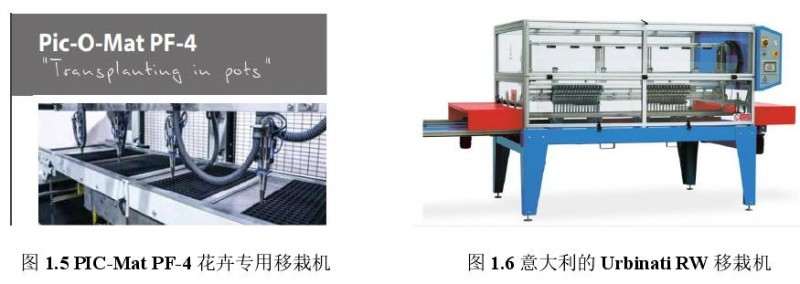
荷兰VISSER公司在温室穴盘移栽领域的技术在国外较为领先,该公司研制了多款移栽产品,自动化水平很高,适应性强。其中有一款专门用于花卉移栽,如图1.5所示。其型号为PIC-MatPF-4[14],每小时可以无损移栽花卉钵苗的数量高达7000株,能够实现取栽一体化,PIC-MatPF-4装配有四个夹持器,保证了取植苗的效果,其伺服系统和专用软件保证了机器的灵活高速,但是该机构进行移栽作业时必须与其专用的盆栽机Mayer进行配合作业,所以在通用性方面存在缺点。
意大利Urbinati:电液气一体化移栽机
意大利设计的UrbinatiRW系列的移栽机[15],如图1.6所示。该设备电液气一体化,不同型号的移栽机所配备的移栽手爪数量不同,最大工作宽度也不同,移栽手抓拆卸装配简便,对于不同规格的穴盘,可以采用单排和多排手爪,手爪系统由气缸、电磁阀、伺服电机等组成,采用无线电控,手爪抓取苗之后,将苗植入传送带上的花盆中,移栽效率最高可达36000株/时,可根据不同的作业要求进行不同工作程序的编写,并且终端具有自我诊断功能,操作方便,缺点是手爪夹持力不足、易漏苗、设备系统复杂、维护成本高。
加拿大CMP:大盆移栽流水线设备
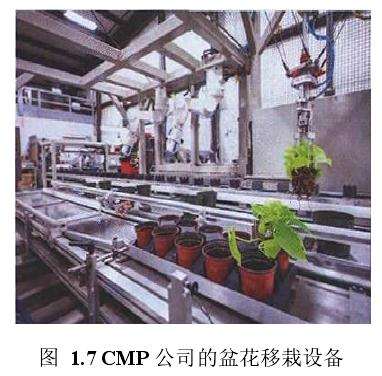
加拿大自动化解决方案供应商CMP研制了一款将花卉从小花盆移栽至大花盆的移栽流水线设备[16],如图1.7所示,该移栽搭配了一套在大花盆中“开穴成型”的系统,在大花盆中用模芯开一个与小花盆形状大小差不多穴,并在里面放置一个防止穴壁基质坍塌的支撑套,花卉移植到大花盆后,基质通过与支撑套底部的漏孔与大花盆的基质接触,使得根系继续生长。该移栽设备只针对大型盆栽花卉,可针对多种品种花卉,适应性较高,具有触摸编程界面,交互性好,但是该设备占地大,设备需要专业定制,系统复杂度高,一套设备价格昂贵,普通农户承受不了。