国内花卉自动化移栽机构研究现状:气吸式视觉识别与智能移栽技术综述
摘要:本文系统梳理了我国花卉自动化移栽机构的研究历程与现状。从上世纪60年代的初步探索到近年来高校与科研院所的自主创新,文章详细分析了空气整根气吸式、气压式、智能视觉识别及模块化自动移栽等多种技术路径。通过对范云翔、吕英石、冯青春等专家研究成果的对比,揭示了国内设备在无损移栽、智能定位及移栽效率方面的突破与现存挑战。
关键词:国内花卉移栽;自动化移栽机构;气吸式移栽机;视觉识别移栽;农业机械化
国内研究背景与挑战
我国于上世纪60年代初期开始了移栽机械关键技术的研究工作,但是由于农机和农艺标准的不统一,更没有对育苗移栽机械化过程的种种技术难题进行科学和系统地分析研究,致使这一技术被搁浅,未能推广和应用[17]。
随着我国农业的不断发展,工厂化育苗技术也被逐渐的引进国内,所以在自动化移栽机械的需求也逐步增加,直接引进国外的设备存在以下几种问题:国外的移栽设备都较昂贵、维修保养起来成本也高、技术服务也较难到位、国内与国外的农业基础设施不匹配,也较难推广,所以国内的一些高校和科研院所开始探索适合中国农业移栽自动化发展的道路。
空气整根气吸式移栽技术
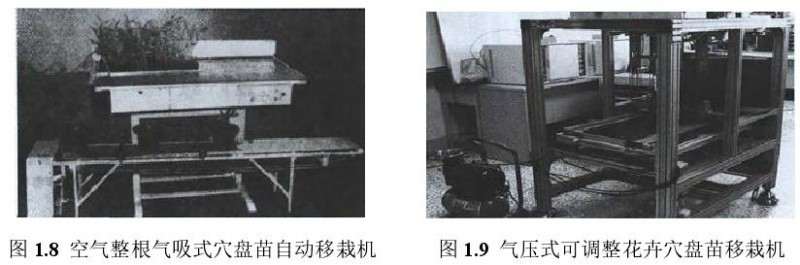
1996年,范云翔等人研发出了一种空气整根气吸式穴盘苗自动移栽机[18],如图1.8所示。其利用气缸带动活塞,能够将幼苗从上部的钵苗盘中吸附进活塞中,将机构对幼苗的损伤降到了最低,被吸附的幼苗最终从活塞中滑落,掉落进下方的大秧盘中,被传送带结构送走,再进入下一工位,该机构由单片机系统进行控制,移行机构由步进电机驱动,精度可以得到保证,设备的适应性也较高,该设备对韧性比较大的钵苗如水稻苗的移栽效果较好,但在吸附花卉和蔬菜等杆茎比较脆的钵苗易造成候折断杆茎。
气压式可调整移栽机研究
2003年,中国台湾吕英石研制了气压式可调整花卉穴盘苗移栽机,如图1.9所示。该移栽机能够实现人机交互、穴盘供盘、穴盘定位、穴盘夹持和移栽等功能,穴盘苗定位机构和夹持机构分别由PLC控制的步进电机和气缸驱动,2个机构配合完成移栽动作,一次性可从穴盘移出6株幼苗,但是作业效率不高[19]。
视觉识别与智能移栽系统
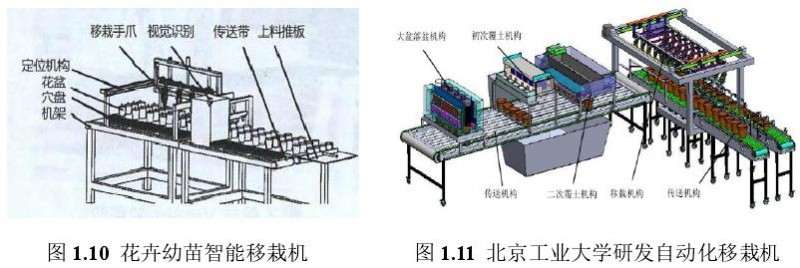
北京农业智能装备技术研究中心的冯青春等人[20]研制的花卉幼苗智能移栽机专门针对的是从816穴孔规格的钵苗盘往直径为100mm,高为75mm的花盆进行移栽的自动化移栽机,如图1.10所示。这款移栽机的特点是其上搭载有工业相机,通过视觉识别对钵苗位置进行定位,将幼苗的信息实时反馈给控制系统,控制系统控制移栽手爪对品质好的幼苗进行移栽,将缺苗和病苗剔除,提高了移栽质量,但是机器的设计开发成本太高。
模块化与柔性抓取移栽技术
为了完成花卉从小花盆到大花盆的自动化移栽,北京工业大学的杨行[21]根据模块化的思想,开发了一套基于PLC控制的自动化移栽机,如图1.11所示。其将移栽作业分为:落盆、花盆传送、初次覆土、二次覆土、揉搓、移栽,不同的作业阶段,有专用的机构进行作业,其中二次覆土环节中有一个在大花盆中“开模”的过程,这个过程与CMP公司所生产的移栽机中“开穴成型”差不多,其移栽手爪较为有特色,不是直接将秧针插入基质夹取,而是先通过揉搓机构将花卉的茎叶束拢起来,其抓取动作是由两个相同的手臂从束拢好的茎的两边往茎上靠拢,将花卉“抱紧”,然后机械手臂再推出秧针插入基质进行移栽,这样就很大程度上避免了伤苗,这样的过程也影响了移栽的效率。

间歇传动行星轮系移栽研究
浙江理工大学解杰[22]以人机交互的方式对机构进行参数优化,设计了一种偏心-不完全非圆齿轮间歇传动行星轮系花卉移栽机,如图1.12所示。该机构能实现取苗和植苗入盆,机构的结构紧凑,占地较少,机构的运动方式简单,在移栽效率上较为突出,但在实验中,机构所形成的移栽轨迹高度偏低,将花卉幼苗植入花盆的时候,植苗深度不够,花卉苗直立度不够,易产生歪斜。